Hoy en día gracias a los medios de comunicación no es difícil ver por todo el mundo los avances en robótica, que lejos de quedarse varados avanzan a paso agigantados, prácticamente la evolución de estos sistemas se han basado en emular la capacidad sensorial del ser humano, dando así a estas máquinas unas utilidades infinitas.
En este caso nos centraremos en la robótica virtual, es parte de la robótica encargada de llevar a los medios informáticos cualidades propias de las personas, tales como la visión, tacto, etc.
La robótica virtual consiste en hacer que el ordenador funcione como el cerebro de un robot ya sea interactuando con otras personas (chat bot) , ejecutando ordenes o controlando diversos periféricos externos.
Una de las principales ventajas de una implementación de robótica virtual es que esta puede recibir órdenes en lenguaje natural. Estamos acostumbrados a interactuar con software recordando una infinidad de comandos de complejidad diversa. Las ventajas de interactuar con un PC usando los lenguajes naturales son enormes.
Ahora bien este proceso cuenta con algún que otro inconvenientes. Uno de los principales problemas a los que se enfrenta la Realidad Virtual para convencernos de que estamos en un entorno realista es el relacionado con la interacción usuario-mundo virtual. O lo que es lo mismo que el usuario pueda interactuar con ese mundo virtual. ¿Y cómo?
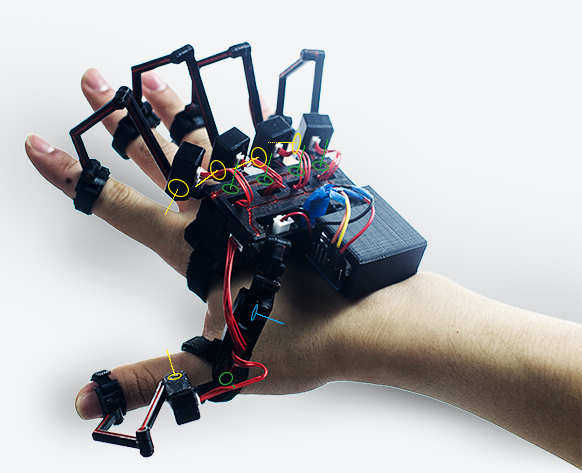
Por ejemplo encontramos casos como el de la empresa Dexta Robotics , la cual está trabajando en un proyecto revolucionario, se trata de DEXMON.
Dexmo, es un conjunto de sensores y detectores montados en un exoesqueleto mecánico portátil. Al mover los dedos y la mano, el software detecta los cambios de posición y los refleja instantáneamente en la Realidad Virtual, con lo que podemos ver nuestras manos virtuales y mover objetos. Que pretende rompe la línea entre el mundo digital y real y dotar ha está del sentido del tacto.
[youtube http://www.youtube.com/watch?v=9ZPpBcvmlps&w=560&h=315]
De momento esta empresa está realizando diversos proyectos en fase de prueba, y pretende sacar al mercado varios modelos como:
- Dexmo Classic: captura 11 grados de libertad para que la mano de movimiento. Tres grados de libertad de movimiento para el pulgar, y tanto la división y flexión de los restantes cuatro dedos. Estos datos, junto con el avance y algoritmos de cinemática inversa construida en SDK puede proporcionar a los desarrolladores un modelo de mano precisa esqueleto, especialmente para la parte del pulgar. Se puede introducir su gesto detallada mano de VR al instante.
- Dexmo F2: tiene toda la funcionalidad que hace Dexmo Classic, pero por encima de eso que le provee de retroalimentación de fuerza digital (dentro y fuera).
Aunque están en fase de prueba, la empresa está recaudando fondos a través de una campaña de kickstarter, para reunir los 200.000$ que necesitan y poder lanzar cuanto antes al mercado esto invento por un precio estimado de 200$